


 アクセス
アクセス お問い合わせ
お問い合わせ 資料請求
資料請求
「有松鳴海絞りロボットにおける樹脂キャップ反転装置の開発」について学会発表/石川千馬さん、片岡京介さん
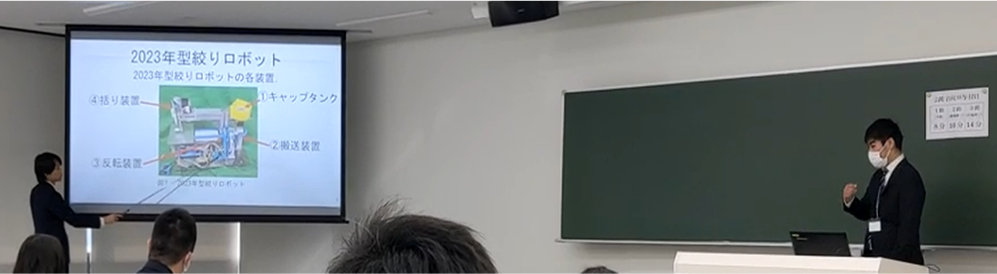
石川さん、片岡さんによる発表の様子
2024年3月4日に開催された日本機械学会東海学生会の第55回学生員卒業研究発表講演会で、工学部機械システム工学科 篠原研究室 4年生の石川千馬さんと片岡京介さんが「有松鳴海絞りロボットにおける樹脂キャップ反転装置の開発」と題して発表しました。
このプロジェクトは、職人でない人でも絞りロボットを扱えるようにすることを目指しており、特に注目されたのはカムやギヤを用いた反転装置の開発です。反転装置が樹脂キャップを72%の確率で反転できることが示され、制御の簡略化と機能性向上が図られました。ただし、モータの回転や振動による不具合、および3Dプリンタで製作された部分の歪みやずれが課題となっています。
絞りロボット全体の構造は、キャップタンク、樹脂キャップ搬送装置、樹脂キャップ反転装置、括り装置の4つで構成され、主にA5052、PLA、TPUの材料が使用されました。これらの部品は3Dプリンタを使用して製作され、寸法は縦400mm、横230mm、高さ300mmで重量は5.7kgです。
反転装置の特徴として、カム機構とラック&ピニオンを使用し、樹脂キャップの内径差を利用して反転する仕組みが採用されました。また、樹脂キャップの装填や検知に関する検証結果も含まれており、特に距離センサを用いてキャップの有無を判別する手法についても言及されました。
発表者らはさらなる改善点として、金属製部品の導入や位置合わせの精度向上が必要であると指摘しています。結言では、樹脂キャップ反転装置の性能と課題が総括されており、今後の展望として金属部品の利用や位置合わせの向上が必要とされています。このプロジェクトの成果は、機械学会における技術の進展を示すものであり、今後の研究や開発に期待が寄せられています。
- この記事をシェアする





